

Contact R&D: Y. Hello
MUG is a multichannel 3 and half year’s autonomy ocean bottom system named MUG-OBS (Multi-parameters Geophysical Ocean Bottom System) allowing the acquisition of various seismic and environmental parameters. Initially developed for a 3-channel seismometer (Trillium compact 120s), a 3-channel accelerometer, a Differential Pressure Gauge (DPG), an absolute pressure sensor including a hydrophone, the acquisition system can interface other sensors.
Its originality lies in the possibility of data transfer to the surface using releasable-shuttles. MUG can carry up to six shuttles. It is a free-falling instrument rated down to 6000 m. The installation of the seismic sensor is monitored by acoustic commands from the surface and a health bulletin with data checking is recovered by acoustic during the installation. Since sensors stayed at the same location for 3.5 years, it is a perfect tool to monitor seismic events, background seismic activity and aftershock distribution among other applications.
The structure is made of non-corrosive materials, polyethylene, peek, nylon, and pressure vessels are made in glass or titanium (Figure 1). Buoyancy is ensured by syntactic foam bar. The steel dead weight anchor, which draws down the OBS to the bottom of the Ocean is protected by anodes. The whole structure is shaped to resist trawling. Seismic sensors are protected by the structure itself to prevent noise from current convection and to ensure a good coupling.
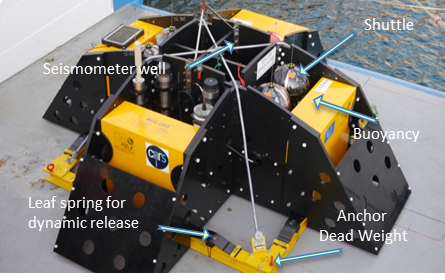 |
Figure 1: MUG-OBS 2.9m x 2.9m x 1m, for a weight in Air 1.5t (3307Lb) is made of non-conductive material (Syntactic foam, Polyethylene, glass and Titanium) and shaped to resist trawling. The dead weight anchor made in steel with anodes is abandoned on recovery to allow MUG-OBS to rise by its own positive buoyancy. When released from anchor, height leaf springs will produce an additional 8 x 25kg force to help the 250 Kg of buoyancy for taking off. |
 |
Figure 2: Data shuttle on its way to the surface and at sea-surface. The electronic, encapsulated in a 13’’ glass sphere, is designed around a Cortex M4 microprocessor, memory boards (SD cards), an internal clock, a flash light, a GPS and AIS to track the shuttle on the surface, and is powered by a LiSO2 battery. The shuttle clock synchronizes with the main clock of the system just before the shuttle is released, and synchronizes itself as soon as a GPS signal is received at sea-surface. This enables monitoring the clock-drift of the main acquisition clock at each shuttle recovery over the 3 years of the MUG-OBS permanent installation. |
